SM5/7 자동차 조그셔틀 분해 및 분석(CAN 프로토콜)




르노삼성의 SM5/7(L43, L47)의 조그셔틀

르노삼성의 sm5, sm7에는 DIS(Diver Information System) 조그셔틀이 순정(네비에 따라 유무)으로 장착되어있고 기타 튜닝용품으로 사제 조그셔틀도 출시되어 있는데 순정 조그셔틀은 순정에서도 내비게이션의 종류(스마트 커넥트 등)에 따라 호환 여부가 갈리고 사제 네비용 사제 조그셔틀 또한 별도의 트립에 연결해서 제어하는 것으로 알고 있습니다.( 별도의 학습을 하지 않는 한 핸들 리모컨에서 지원하는 기능만 사용 가능), 저는 순정이든 사제든 호환이 되지 않는 내비게이션을 사용하고 있지만 (추후 계속 작업 일지를 업로드 예정) 안드로이드 오토/ 카플레이 시스템을 만듬에 있어 화면 터치가 아닌 조그셔틀로 제어를 하고 싶은 마음에 중고로 조그셔틀을 구매해보았습니다. 여타 다른 메이커(현기)와 달리 극악의 호환성을 자랑하는 르노삼성 차량의 오너 분들께 조금이라도 정보가 될 것 같아 글을 작성하게 되었습니다.( Can 통신을 사용하는 장비라면 어떤 차량도 참고가 될 것 같습니다.)
21.1.18 - 조그 셔틀 Can 프로토콜 분석 및 제어 성공(부분적)
르노 삼성 조그셔틀 분해

르노삼성의 조그셔틀의 파트 넘버는 253B00182R, Multimedia Center Switch입니다. 다른 고급 수입차의 조그셔틀의 멋진 컨트롤러와 달리 조그 부분은 상하좌우(대각선 X), 좌회전, 우회전 클릭을 지원하며 내비, 현 위치, 음성 안내등 기능키가 있습니다.( 이러한 기능키는 적용된 네비에 따라 다른 것을 확인할 수 있었습니다.)

뒤판의 나사 4개를 풀어주면 별다른 고정 없이 분해가 가능합니다. 버튼 부분은 -드라이버로 지렛대 원리로 힘을 주면 쉽게 제거가 가능합니다.
르노 삼성 조그셔틀 분석

르노삼성의 조그셔틀의 전면부 PCB에는 LED, 버튼, 로터리 스위치가 적용되어 있습니다. 버튼은 단순한 Push 버튼이었으며 로터리 스위치는 앞서 언급한 대로 상하좌우, 좌우회전, 클릭을 지원합니다.

로터리 스위치(엔코더)는 축이 회전할때마다 펄스를 발생시키고 이를 이용하여 각도, 속도를 측정합니다. 자동차에서는 스위치가 추가되어 멀티미디어 등을 제어할 때 사용합니다. 처음 조그셔틀을 사용한 프로젝트를 기획했을 때는 스위치, 로터리 엔코더를 PCB 회로에서 단락 시키고 출력단을 별도의 MCU에 장착하여 원하는 출력(프로토콜)을 뽑아내려 했는데 특정 입출력 방식이 아닌 CAN 통신으로 조그셔틀이 동작하는 것을 확인하여 CAN 프로토콜을 분석하여 사용하기로 결정하였습니다.
르노 삼성 조그셔틀 분석2
조그셔틀의 뒷면 PCB 사진은 아래와 같습니다.

후면의 PCB에서 특이점은 MCU로 NEC의 PD78 F0881(A)를 사용하고 CAN Driver로 NXP의 PCA82 C 250을 사용하는 점입니다. 후자의 경우 인터넷에 쉽게 데이터 시트를 찾을 수 있었지만 전자의 NEC, PD78 F0881(A)의 경우 데이터 시트를 찾는데 총 작업시간의 10%를 차지할 만큼 검색이 힘들었습니다.(MCU에 풀네임을 적지 않아..)
MCU의 데이터 시트가 필요했던 이유는
1. MCU의 전원, 그라운드를 찾기 위해( 역으로 회로를 분석하기 용이), 위 사진 가운데 하얀 암 잭의 핀 맵을 모르므로.
2. 동작 전압을 알기 위해.
3. 입출력단에 어떤 핀을 사용하는지 알기 위해( 잭에 출력단을 찾기 위해)
가 되겠습니다. PD78 F0881(A)의 데이터 시트를 잠시 살펴보면

PD78F0881(A)의 44 pin 모델의 경우 10,11핀이 GND, Vdd이며 19,20번 핀이 CAN 통신을 하는 송수신부였습니다.
보통 MCU는 3.3v의 동작전압을 지니고 있는데

르노삼성 조그셔틀의 MCU인 PD78 F0881(A)는 클럭에 따라 1.8~5.5v의 동작전압 폭을 지니고 있으며 해당 보드의 경우 8 MHz의 외부 크리스털이 달려있고 동작전압은 5V 였습니다.
CAN 통신을 담당하는 NXP의 PCA82C250의 경우 아래의 그림과 같은 Pin을 갖고 있습니다.

19,20번 핀 CRxD, CTxD가 PCA82C250의 1,4번 핀에 들어가고 7,6번으로 CAN H, L 신호가 나오게 됩니다. 이를 바탕으로 7,6번의 패턴을 따라가 보면
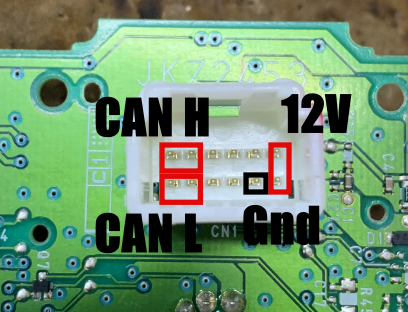
아래와 같은 결과를 얻을 수 있습니다. 특이사항으로(저의 실력이 부족한 사항으로) 12V핀 2개 중 아래의 핀(이하 1핀)은 확실히 전원부에 연결되어 있으며, 위에 핀(이하 2핀)은 미등으로 추정되었습니다.
하지만 2 번핀(위에 핀, 미등 추정)에 12V가 인가되지 않으면 전원부에도 전원이 공급되지 않는 현상이 발생하였으며 또한 2번 핀이 인가되더라도 LED에 전원이 공급되지 않았습니다.
LED는 PCB외각에 전원부 패턴이 그려져 있는데 이 패턴에 전압이 전혀 인가되지 않았고 점퍼를 날릴 경우 빛이 들어왔지만 자세한 회로도를 모르는 상황에서 쇼트가 날 우려가 있어 LED는 사용하지 않기로 하였습니다.
르노 삼성 조그셔틀 CAN 통신 분석
이제 CAN High Low를 알게 되었으니 오실로스코프로 CAN의 파형을 찍어보았습니다.

(캔 통신은 처음 다뤄보는 것이기 때문에 정확하지 않지만) 정상적으로 파형이 나오는 것을 확인할 수 있었습니다. 전압이 인가되면 주기적으로 신호를 발생하고 특정 버튼을 눌렀을때 특정 신호를 출력하는것을 확인할수 있었습니다.
'MCU 공부 > 아두이노 Arduino' 카테고리의 다른 글
| [아두이노Arduino 시작하기](3)아두이노 시리얼 모니터 사용하기 (0) | 2020.10.07 |
|---|---|
| [아두이노Arduino 시작하기](2)아두이노 (예제)코드 업로드 방법 (0) | 2020.10.07 |
| [아두이노Arduino 시작하기](1)아두이노 IDE설치 및 호환보드 칩셋 설치 (0) | 2020.10.06 |
| [아두이노Arduino 시작하기](0)아두이노 선택 방법 및 용어 설명 (0) | 2020.10.06 |
| 맥OS, 윈도우에서 아두이노 호환보드(CH340 칩셋) 사용하기 (3) | 2020.05.10 |
